| もっと身近にecoを・・・ |
ごあいさつ | 会社案内 | 展示会出展 | 愛・地球博出展 |
|
|||||||||||||||||||||||||||||
| 追尾駆動にかかる消費電力を極力抑えた 自立駆動制御方式によるリアルタイム追従方式 |
|
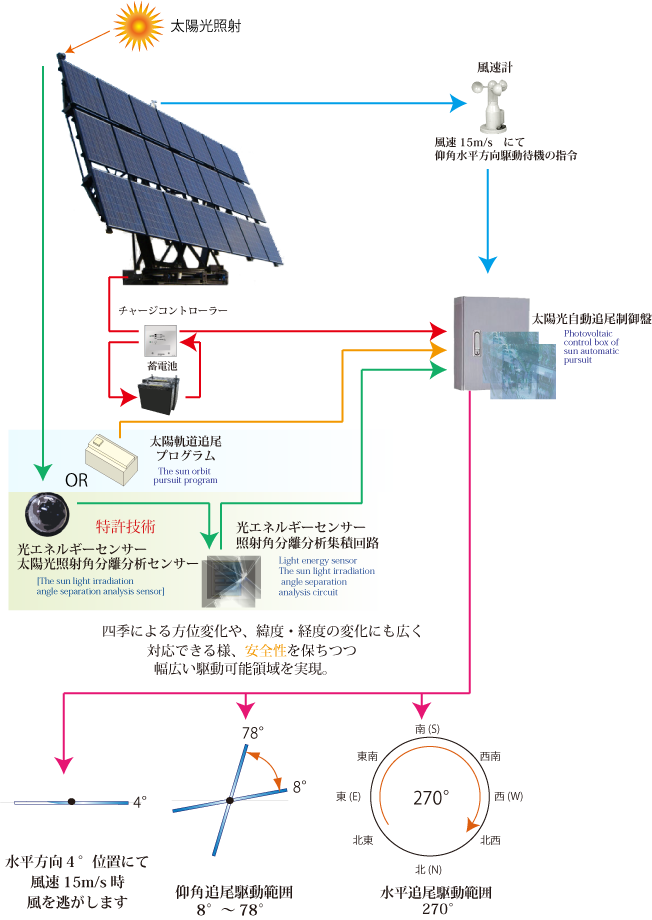
自立駆動制御方式による完全自己完結運転 |
|
|
追尾駆動を行います。外部電源は不要。 尚、外部からの電源供給により運転する事も可能です |
| ●プログラム追尾方式 | |
 |
太陽の軌道をプログラム追尾します。 メリット:外乱(外部からのノイズの影響が殆どない) デメリット:特に無し |
|
|
|
| ●センサー追尾方式 | |
 |
光エネルギーセンサーが太陽光を受光すると、照射角分離分析集積回路により 照射方向の位置情報と太陽電池アレイが効率よく発電できるレベルを[検知⇒分析] 『太陽電池アレイが効率よく発電出来る』という情報を得て初めて太陽光追尾駆動を 開始します尚、無駄なく高効率で太陽電池アレイを発電させる為、うす曇や、散乱光、 “もや” などがある場合には無駄な追尾駆動は行いません メリット:太陽光が有る時のみ駆動するので低消費電力 デメリット:外乱(外部からのノイズ 反射光や電源ノイズ)を受けやすい |
| 『太陽光追尾動作の流れ』 |
|
|
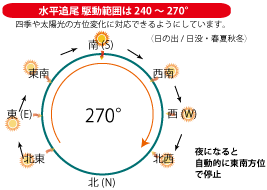
| 日の出から日没まで駆動追尾します 日没になり太陽高度が下がると、次の日の朝に向けて待機します。 待機する方位角は、東北方位 仰角は、水平位置(0°)です。 |
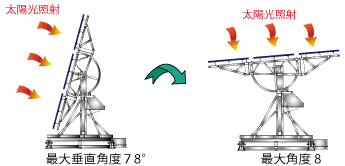
| 『幅広い駆動範囲』 |
|
|
| ①:日の出前・待機状態位置【水平方位・東南/又は、東方位で待機】【仰角角度・0°】※任意設定可能 |
| ②:自動追尾動作最大範囲 北東-南-北西 【水平方位270°】【仰角角度0°-70°】 強風時には、水平位置で待機。 水平駆動範囲は最大270 |
 |
 |
|
| 最大垂直角度90°(仮定最大負荷角度)での耐風速は60m/s 近年頻繁に起こる突風に対応したものです。 |
Copyright ©テックオカザキ All Rights Reserved.